隨著新能源汽車與智能駕駛技術的快速發(fā)展,車輛制動系統(tǒng)正經歷著從傳統(tǒng)液壓制動向電控化、集成化方向的深刻變革。協(xié)調再生制動控制策略與集成線控制動系統(tǒng)的開發(fā),成為提升車輛能量回收效率、保障制動安全與舒適性的關鍵技術。本文將探討如何利用MATLAB仿真平臺,進行上述控制策略與系統(tǒng)的設計與驗證,并闡述其在計算機系統(tǒng)集成框架下的實現路徑。
一、研究背景與意義
傳統(tǒng)燃油車的制動能量主要以熱能形式耗散,造成了巨大的能量浪費。對于電動汽車和混合動力汽車而言,再生制動技術能夠將車輛減速時的部分動能轉化為電能儲存起來,從而顯著延長續(xù)航里程。再生制動與機械摩擦制動的協(xié)調控制是一個復雜問題,需在確保制動效能、方向穩(wěn)定性與駕駛感受的前提下,最大化能量回收。
線控制動系統(tǒng)取消了傳統(tǒng)制動踏板與執(zhí)行機構之間的機械連接,完全通過電信號傳遞制動指令,為制動力的靈活、精確分配提供了硬件基礎。將協(xié)調再生制動控制策略與線控制動系統(tǒng)深度集成,是實現高效、智能、安全制動的必然趨勢。
二、基于MATLAB的協(xié)調再生制動控制策略仿真
MATLAB/Simulink因其強大的建模、仿真與控制算法開發(fā)能力,成為車輛控制系統(tǒng)設計與驗證的首選工具之一。開發(fā)流程通常包括:
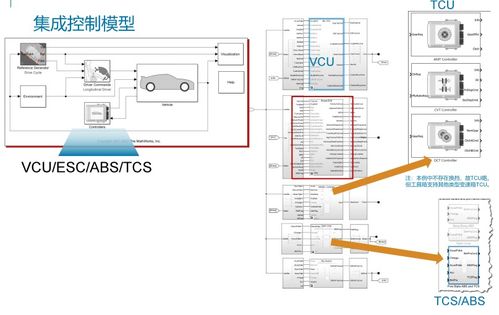
- 整車動力學模型建立:利用Simulink或相關的車輛動力學模塊(如Vehicle Dynamics Blockset),搭建包含車身、輪胎、懸架、動力系統(tǒng)及電池的整車模型,作為被控對象。
- 制動系統(tǒng)模型建立:分別建立電機再生制動系統(tǒng)模型(體現轉矩-發(fā)電特性)和液壓/電子機械制動系統(tǒng)模型(體現制動力響應特性)。
- 控制策略設計與仿真:核心是設計上層制動扭矩分配策略。常見的策略包括基于制動踏板開度、車輛狀態(tài)(如車速、電池SOC)的規(guī)則分配法,以及以能量回收效率最優(yōu)或兼顧多種性能指標為目標的最優(yōu)控制法(如模糊控制、模型預測控制MPC)。在Simulink中搭建控制算法模型,與整車模型進行閉環(huán)聯(lián)合仿真。
- 性能評估:通過仿真,定量分析不同策略下的能量回收率、制動距離、制動穩(wěn)定性(如前后軸制動力分配曲線與理想I曲線的契合度)以及踏板感覺等指標。
通過仿真,可以在投入實物開發(fā)前,快速迭代和優(yōu)化控制策略的參數與邏輯,大幅降低開發(fā)成本和風險。
三、集成線控制動系統(tǒng)的開發(fā)與計算機系統(tǒng)集成
集成線控制動系統(tǒng)(如One-Box方案)將制動壓力調節(jié)單元、電機控制器、整車控制器等相關功能高度集成在一個ECU中。其開發(fā)是一個典型的計算機系統(tǒng)集成工程,涉及多領域技術的融合:
- 硬件在環(huán)仿真:在控制策略模型通過離線仿真驗證后,可將模型代碼(通過MATLAB Coder生成)下載到快速原型控制器中,與真實的制動執(zhí)行器、傳感器等硬件組成HIL測試系統(tǒng),進行更接近實物的驗證。
- 軟件架構與集成:系統(tǒng)軟件采用分層架構,通常包括:
- 應用層:實現前述的協(xié)調再生制動控制算法,決定總需求制動力及前后軸、再生/摩擦制動力分配。
- 底層驅動層:控制電機實現再生扭矩,控制電磁閥或電機泵實現液壓壓力精確調節(jié)。
- 通信層:通過CAN/CAN FD等車載網絡,與電池管理系統(tǒng)、整車控制器、輪速傳感器等進行信息交互。
- 安全監(jiān)控層:實現系統(tǒng)故障診斷、冗余管理和失效安全策略。
- 系統(tǒng)集成與測試:將各軟件模塊集成編譯,刷寫到目標ECU中,與制動踏板模擬器、液壓單元、電機等構成完整系統(tǒng)。在臺架和實車上進行全面的功能、性能及可靠性測試。整個集成過程需要嚴格的版本管理和測試流程,確保軟件與硬件、各子系統(tǒng)之間協(xié)調一致。
四、MATLAB在集成開發(fā)中的貫穿作用
MATLAB工具鏈在此集成開發(fā)過程中扮演了核心角色:
- 前期仿真設計:Simulink用于算法建模與離線仿真。
- 自動代碼生成:Simulink Coder/Embedded Coder可直接從經過驗證的控制器模型生成高質量的C代碼,極大提高了從模型到產品代碼的轉換效率和可靠性。
- 測試驗證:Simulink Test等工具可支持單元測試、集成測試用例的創(chuàng)建與管理。HIL測試環(huán)境也常以Simulink Real-Time等為核心構建。
五、結論與展望
基于MATLAB仿真進行車輛協(xié)調再生制動控制策略開發(fā),并結合計算機系統(tǒng)集成技術實現集成線控制動系統(tǒng),是一條高效、可行的技術路徑。該方法實現了從虛擬驗證到實物集成的無縫銜接,加速了先進制動系統(tǒng)的研發(fā)進程。隨著智能網聯(lián)技術的深入,制動系統(tǒng)將與自動駕駛規(guī)劃決策模塊更緊密地結合,實現預測性能量回收和車路協(xié)同制動,對控制策略的智能性和系統(tǒng)集成的復雜度提出了更高要求,MATLAB等仿真與開發(fā)平臺將繼續(xù)發(fā)揮不可替代的作用。